ALGO SOBRE.......
MAPAS CONCEPTUALES




MAPAS CONCEPTUALES
¿QUIEN ERA NEWTON?
Parese que todo mundo lo recuerda por una leyenda que todos alguna vez hemos escuchado.Se dice que
a Newton un día ,mientras descansaba plácidamente, le cayó una manzana en la cabeza y entonces se dio
cuenta de que "existía" una ley llamada "Ley de la gravedad",enunciándola como"Todo lo que sube tiene que
bajar".

Isaac Newton (1643 – 1727) fue uno de los mayores científicos de todos los tiempos.
Entre sus principales descubrimientos figuran los trabajos sobre luz y óptica y el desarrollo del cálculo matemático.
Pero, sobre todo, lo que hizo de Newton uno de los mejores científicos de la historia fueron sus Leyes de Newton.
Las leyes de Newton son las siguientes:
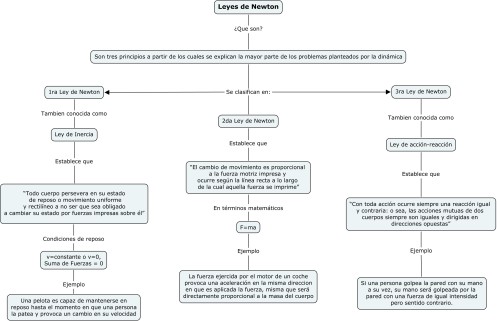
1. Todo cuerpo persevera en su estado de reposo o movimiento uniforme y rectilíneo a
no ser en tanto que sea obligado por fuerzas impresas a cambiar su estado.
Un cuerpo siempre estará en reposo, o en movimiento uniforme
(sin aceleración, a velocidad constante) y rectilíneo a no ser que algo le perturbe. Imagina que estamos en el vacío perfecto
y lanzamos una pelota de tenis al aire. Esa pelota se mantendrá por los siglos de los
siglos a la misma velocidad inicial y siguiendo la misma dirección, a no ser que le apliquemos
otra fuerza que aumente o disminuya su velocidad o cambie su dirección.
En la Tierra, esto no es posible, porque tenemos el problema de la gravedad, que sigue las mismas leyes que la gravitación universal.
Por ello, en el vacío, un cuerpo no caería, o caería eternamente,
como queramos verlo.
2. El cambio de movimiento es proporcional a la fuerza motriz y ocurre según la línea recta
a lo largo de la cual aquella fuerza se imprime.
Esta definición queda más clara si usamos la
ecuación de la segunda ley de Newton:
F = ma
El cambio en el movimiento viene dado por la aceleración a,
que tiene la misma dirección que F. La aceleración es proporcional a la fuerza que le apliquemos a un objeto.
Conociendo la aceleración que le imprimimos,
conoceríamos a la postre la velocidad resultante (que sería la velocidad
inicial sumada a la velocidad causada por la aceleración) y el movimiento.

3. Con toda acción ocurre siempre una reacción igual y contraria: o sea,
las acciones mutuas de dos cuerpos siempre son iguales y dirigidas en direcciones opuestas.
El ejemplo más claro de esta ley lo tenemos al inflar un globo de aire. Si soltamos la boquilla,
el globo saldrá disparado mientras se va vaciando del aire que le hemos introducido. Esto es porque el globo expulsa el aire que introdujimos,
empujando a la atmósfera, y la atmósfera le devuelve el empujón.
Es el mismo principio que utlizan los motores a reacción (como los de los aviones).

Las Leyes de Newton, también conocidas como Leyes del movimiento de
Newton,son tres principios a partir de los cuales se explican la mayor parte de
los problemas planteados por la dinámica, en particular aquellos
relativos al movimiento de los cuerpos. Revolucionaron los conceptos básicos de la física
y el movimiento de los cuerpos en el universo, en tanto que
En concreto, la relevancia de estas leyes radica en dos aspectos:
Así, las Leyes de Newton permiten explicar tanto el movimiento de los astros,
como los movimientos de los proyectiles artificiales creados por el ser humano,
así como toda la mecánica de funcionamiento de las máquinas.
Su formulación matemática fue publicada por Isaac Newton en 1687 en su obra
Philosophiae Naturalis Principia Mathematica.
No obstante, la dinámica de Newton, también llamada dinámica clásica,
sólo se cumple en los sistemas de referencia inerciales;
es decir, sólo es aplicable a cuerpos cuya velocidad dista considerablemente de la
velocidad de la luz (que no se acerquen a los 300,000 km/s);
la razón estriba en que cuanto más cerca esté un cuerpo de alcanzar
esa velocidad (lo que ocurriría en los sistemas de referencia no-inerciales), más posibilidades hay
de que incidan sobre el mismo una serie de fenómenos denominados efectos relativistas o fuerzas ficticias,
que añaden términos suplementarios capaces de explicar
el movimiento de un sistema cerrado de partículas clásicas que interactúan entre sí.
El estudio de estos efectos (aumento de la masa y contracción de la longitud,
fundamentalmente) corresponde a la
teoría de la relatividad especial, enunciada por Albert Einstein en 1905.
//

La base teórica que permitió a Newton establecer sus leyes está también
precisada en sus Philosophiae naturalis principia mathematica.
El primer concepto que maneja es el de masa, que identifica con
"cantidad de materia". La importancia de esta precisión está en que permite prescindir de toda cualidad
que no sea física-matemática a la hora de tratar la
dinámica de los cuerpos. Con todo, utiliza la idea de éter para poder mecanizar
todo aquello no reducible a su concepto de masa.
Newton asume a continuación que la cantidad de movimiento es el
resultado del producto de la masa por la velocidad, y define dos tipos
de fuerzas: la vis insita, que es proporcional a la masa y que refleja la inercia de la materia, y
la vis impressa (momento de fuerza), que es la acción que
cambia el estado de un cuerpo, sea cual sea ese estado; la vis impressa, además de
producirse por choque o presión, puede deberse a la vis centripeta
(fuerza centrípeta), una fuerza que lleva al cuerpo hacia algún punto determinado.
A diferencia de las otras causas, que son
acciones de contacto, la vis centripeta es una
acción a distancia. En esta distingue Newton tres tipos de cantidades de fuerza:
una absoluta, otra aceleradora y, finalmente, la motora,
que es la que interviene en la ley fundamental del movimiento.
En tercer lugar, precisa la importancia de distinguir entre lo
absoluto y relativo siempre que se hable de tiempo, espacio, lugar o movimiento.
En este sentido, Newton, que entiende el movimiento como una
traslación de un cuerpo de un lugar a otro, para llegar
al movimiento absoluto y verdadero de un cuerpo
De acuerdo con esto, Newton establece que los movimientos
aparentes son las diferencias de los movimientos verdaderos y que las fuerzas son causas y
efectos de estos. Consecuentemente, la fuerza en Newton tiene un carácter absoluto, no relativo.
La primera ley del movimiento rebate la idea aristotélica
de que un cuerpo sólo puede mantenerse en
movimiento si se le aplica una fuerza. Newton expone que:
Esta ley postula, por tanto, que un cuerpo no puede cambiar
por sí solo su estado inicial, ya sea en reposo o en
movimiento rectilíneo uniforme, a menos que se aplique una fuerza o una serie de fuerzas
cuyo resultante no sea nulo sobre él. Newton toma en cuenta, así, el que los cuerpos
en movimiento están sometidos constantemente a fuerzas de roce o fricción, que los
frena de forma progresiva, algo novedoso respecto de concepciones anteriores que
entendían que el movimiento o la detención de un cuerpo se debía exclusivamente a si
se ejercía sobre ellos una fuerza, pero nunca entendiendo como esta a la fricción.
En consecuencia, un cuerpo con movimiento rectilíneo uniforme implica que no existe
ninguna fuerza externa neta o, dicho de otra forma, un objeto en movimiento no se detiene de
forma natural si no se aplica una fuerza sobre él. En el caso de los cuerpos en reposo,
se entiende que su velocidad es cero, por lo que si esta cambia
es porque sobre ese cuerpo se ha ejercido una fuerza neta.

La segunda ley del movimiento de Newton dice que
Esta ley explica qué ocurre si sobre un cuerpo en movimiento
(cuya masa no tiene por qué ser constante) actúa una fuerza neta:
la fuerza modificará el estado de movimiento, cambiando la velocidad en módulo o dirección.
En concreto, los cambios experimentados en la cantidad de movimiento de
un cuerpo son proporcionales a la fuerza motriz y se desarrollan en la
dirección de esta; esto es, las fuerzas son causas que producen aceleraciones
en los cuerpos. Consecuentemente, hay relación entre la causa y el efecto,
esto es, la fuerza y la aceleración están relacionadas. Dicho sintéticamente,
la fuerza se define simplemente en función del momento en que se aplica
a un objeto, con lo que dos fuerzas serán iguales si causan la misma tasa
de cambio en el momento del objeto.
En términos matemáticos esta ley se expresa mediante la relación:
Donde  es la cantidad de movimiento y
es la cantidad de movimiento y  la fuerza total.
la fuerza total.
Si suponemos la masa constante y nos manejamos con velocidades que no superen
el 10% de la velocidad de la luz podemos reescribir la ecuación anterior
siguiendo los siguientes pasos:
Sabemos que es la cantidad de movimiento, que se puede
escribir m.V donde m es la masa del cuerpo y V su velocidad.

Consideramos a la masa constante y podemos escribir
 aplicando estas modificaciones a la
aplicando estas modificaciones a la
ecuación anterior:
que es la ecuación fundamental de la dinámica, donde la
constante de proporcionalidad, distinta para cada cuerpo,
es su masa de inercia. Veamos lo siguiente, si despejamos m
de la ecuación anterior obtenemos que m es la relación que
existe entre y  . Es decir la relación que hay entre la
. Es decir la relación que hay entre la
fuerza aplicada al cuerpo y la aceleración obtenida.
Cuando un cuerpo tiene una gran resistencia a cambiar su aceleración
(una gran masa) se dice que tiene mucha inercia. Es por esta razón por
la que la masa se define como una medida de la inercia del cuerpo.
Por tanto, si la fuerza resultante que actúa sobre una partícula no
es cero, esta partícula tendrá una aceleración proporcional a la magnitud
de la resultante y en dirección de ésta. La expresión anterior así establecida
es válida tanto para la mecánica clásica como para la mecánica relativista, a pesar
de que la definición de momento lineal es diferente en las dos teorías: mientras que
la dinámica clásica afirma que la masa de un cuerpo es siempre la misma,
con independencia de la velocidad con la que se mueve, la mecánica relativista
establece que la masa de un cuerpo aumenta al crecer la velocidad
con la que se mueve dicho cuerpo.
De la ecuación fundamental se deriva también la definición de
la unidad de fuerza o newton (N). Si la masa y la aceleración
valen 1, la fuerza también valdrá 1; así, pues, el newton es la
fuerza que aplicada a una masa de un kilogramo le produce
una aceleración de 1 m/s². Se entiende que la aceleración
y la fuerza han de tener la misma dirección y sentido.
La importancia de esa ecuación estriba sobre todo en
que resuelve el problema de la dinámica de determinar
la clase de fuerza que se necesita para producir los
diferentes tipos de movimiento: rectilíneo uniforme (m.r.u),
circular uniforme (m.c.u) y uniformemente acelerado (m.r.u.a).
Si sobre el cuerpo actúan muchas fuerzas, habría que determinar
primero el vector suma de todas esas fuerzas. Por último,
si se tratase de un objeto que cayese hacia la tierra con una
resistencia del aire igual a cero, la fuerza sería su peso, que
provocaría una aceleración descendente
igual a la de la gravedad.

Paso 1. Aplicando la segunda ley de Newton y
considerando positivas las fuerzas en el
sentido del movimiento: ![]() ; sustituyendo
; sustituyendo
de acuerdo al diagrama de cuerpo libre de la figura:
![]() ; como la fuerza de rozamiento
; como la fuerza de rozamiento
está expresada por
![]() ; sustituyendo :
; sustituyendo : ![]() ;
;
eliminando la masa:
![]() ; sustituyendo los
; sustituyendo los
valores proporcionados:
![]()
con lo cual se obtiene que la aceleración
es de ![]()
Paso 2. La distancia en la cual se detiene,
se obtiene sustituyendo los datos en la relación:
![]() ; con lo cual resulta
; con lo cual resulta ![]()
Resp. PROBLEMA 2. Un auto lleva una velocidad de
![]() en el instante en que aplica los frenos en forma
en el instante en que aplica los frenos en forma
constante, y recorre 50m hasta llegar al reposo.
Determinar: a) el tiempo empleado en detenerse; b)
el coeficiente cinético de rozamiento entre las llantas y el asfalto.

Paso 1. Con los datos proporcionados, calcular la desaceleración:
![]() ; despejando y sustituyendo:
; despejando y sustituyendo:
![]() .
.
Paso 2. Con la aceleración obtenida, se calcula ahora el tiempo
que tarda en detenerse: ![]() ; despejando y sustituyendo
; despejando y sustituyendo
valores: ![]() Resp.
Resp.
Paso 3. Para calcular el coeficiente de rozamiento dinámico,
se utiliza la segunda ley de Newton:
![]() siendo en este caso
siendo en este caso ![]() , por ser la única fuerza,
, por ser la única fuerza,
la fuerza de rozamiento, la que se opone al movimiento;
sustituyendo ![]() se obtiene:
se obtiene:
![]() ; la fuerza normal N es igual al peso del auto
; la fuerza normal N es igual al peso del auto
por estar sobre una superficie horizontal; por lo que
sustituyendo: ![]() ; quedando:
; quedando:
![]() ; por lo que el valor del coeficiente de rozamiento, es
; por lo que el valor del coeficiente de rozamiento, es
![]() Resp.
Resp.
La tercera ley es completamente original de Newton
(pues las dos primeras ya habían sido propuestas de otras maneras por
Galileo, Hooke y Huygens) y hace de las leyes de la mecánica un
conjunto lógico y completo.Expone que por cada fuerza que actúa sobre
un cuerpo, este realiza una fuerza de igual intensidad y dirección,
pero de sentido contrario sobre el cuerpo que la produjo.
Dicho de otra forma, las fuerzas, situadas sobre la misma recta,
siempre se presentan en pares de igual magnitud y opuestas en sentido.
Este principio presupone que la interacción entre dos partículas
se propaga instantáneamente en el espacio
(lo cual requeriría velocidad infinita), y en su formulación original no es
válido para fuerzas electromagnéticas puesto que estas no se propagan por
el espacio de modo instantáneo sino que lo hacen a velocidad finita "c".

Es importante observar que este principio de acción y reacción
relaciona dos fuerzas que no están aplicadas al mismo cuerpo, produciendo
en ellos aceleraciones diferentes, según sean sus masas. Por lo demás, cada
una de esas fuerzas obedece por separado a la segunda ley.
Junto con las anteriores, permite enunciar los principios de conservación
del momento lineal y del momento angular.
Después de que Newton formulara las famosas tres leyes,numerosos
físicos y matemáticos hicieron contribuciones para darles una forma
más general o de más fácil aplicación a sistemas no inerciales o a sistemas
con ligaduras. Una de estas primeras generalizaciones fue el
principio de d’Alembert de 1743 que era una forma válida para
cuando existieran ligaduras que permitía resolver las ecuaciones sin
necesidad de calcular explícitamente el valor de las reacciones
asociadas a dichas ligaduras.
Por la misma época, Lagrange encontró una forma de las
ecuaciones de movimiento válida para cualquier sistema
de referencia inercial o no-inercial sin necesidad de introducir
fuerzas ficticias. Ya que es un hecho conocido que las Leyes de
Newton, tal como fueron escritas, sólo son válidas a los
sistemas de referencia inerciales, o más precisamente, para aplicarlas
a sistemas no-inerciales, requieren la introducción de las llamadas fuerzas
ficticias, que se comportan como fuerzas pero no están provocadas
directamente por ninguna partícula material o agente concreto, sino
que son un efecto aparente del sistema de referencia no inercial.
Más tarde la introducción de la teoría de la relatividad obligó a modificar
la forma de la segunda ley de Newton (ver ()), y la mecánica cuántica dejó
claro que las leyes de Newton o la relatividad general sólo son aproximaciones
al comportamiento dinámico en escalas macroscópicas. También se han conjeturado
algunas modificaciones macroscópicas y no-relativistas, basadas en
otros supuestos como la dinámica MOND.
Las leyes de Newton constituyen tres principios aproximadamente
válidos para velocidades pequeñas. La forma en que Newton las
formuló no era la más general posible. De hecho la segunda y tercera
leyes en su forma original no son válidas en mecánica relativista sin
embargo formulados de forma ligeramente diferente la segunda ley es
válida, y la tercera ley admite una formulación menos restrictiva
que es válida en mecánica relativista.
En un espacio-tiempo plano una línea recta cumple la
condición de ser geodésica. En presencia de curvatura en el espacio-tiempo
la primera ley de Newton sigue siendo correcta si substituimos la expresión
línea recta por línea geodésica.
Segunda ley. Sigue siendo válida si se formula dice que la fuerza sobre una
Sin embargo, ahora la definición de momento lineal en la
momento lineal se define según () mientras que en la teoría de
la relatividad de Einstein se define mediante ():
donde m es la masa invariante de la partícula y  la velocidad
la velocidad
de ésta medida desde un cierto sistema inercial. Esta segunda
formulación de hecho incluye implícitamente definición según la
cual el momento lineal es el producto de la masa por la velocidad.
Como ese supuesto implícito no se cumple en el marco de la
teoría de la relatividad de Einstein (donde la definición es ),
la expresión de la fuerza en términos de la aceleración en la
teoría de la relatividad toma una forma diferente. Por ejemplo,
para el movimiento rectilíneo de una partícula en un sistema
inercial se tiene que la expresión equivalente a (2a) es:
Si la velocidad y la fuerza no son paralelas,
la expresión sería la siguiente:
de la tercera ley por parte de Newton implica que
la acción y reacción, además de ser de la misma magnitud
y opuestas, son colineales. En esta forma la tercera ley no
siempre se cumple en presencia de campos magnéticos.
dos partículas en movimiento no son iguales y de signo contrario. Esto puede
verse por cómputo directo. Dadas dos partículas puntuales con cargas
q1 y q2 y velocidades  , la fuerza de la partícula 1 sobre la partícula 2 es:
, la fuerza de la partícula 1 sobre la partícula 2 es:
donde d la distancia entre las dos partículas y  es el vector
es el vector
director unitario que va de la partícula 1 a la 2. Análogamente,
la fuerza de la partícula 2 sobre la partícula 1 es:
Empleando la identidad vectorial  ,
,
puede verse que la primera fuerza está en el plano formado por y 
que la segunda fuerza está en el plano formado por y  . Por tanto,
. Por tanto,
estas fuerzas no siempre resultan estar sobre la misma línea, aunque son de igual magnitud.
Como se explicó en la sección anterior ciertos sistemas magnéticos no
cumplen el enunciado fuerte de esta ley (tampoco lo hacen las fuerzas
eléctricas ejercidas entre una carga puntual y un dipolo). Sin embargo
si se relajan algo las condiciones los anteriores sistemas sí cumplirían
con otra formulación más débil o relajada de la ley de acción y reacción.
En concreto los sistemas descritos que no cumplen la ley en su forma fuerte,
si cumplen la ley de acción y reacción en su forma débil:
Todas las fuerzas de la mecánica clásica y el electromagnetismo no-relativista
cumplen con la formulación débil, si además las fuerzas están sobre la misma
línea entonces también cumplen con la formulación fuerte de la tercera ley de Newton.
El teorema de Ehrenfest permite generalizar las leyes de
Newton al marco de la mecánica cuántica. Si bien en dicha
teoría no es lícito hablar de fuerzas o de trayectoria, se
puede hablar de magnitudes como momento lineal y potencial
de manera similar a como se hace en mecánica newtoniana.
En concreto la versión cuántica de la segunda Ley de Newton
afirma que la derivada temporal del valor esperado del momento
de una partícula en un campo iguala al valor esperado
de la "fuerza" o valor esperado del gradiente del potencial:

Donde:
 es el potencial del que derivar las "fuerzas".
es el potencial del que derivar las "fuerzas".  , son las
, son las
funciones de onda de la partícula y su compleja conjugada.
 denota el operador nabla.
denota el operador nabla.
Otras Teorias.......
Se denomina Leyes de Newton a tres leyes concernientes al
movimiento de los cuerpos. La formulación matemática fue
publicada por Isaac Newton en 1687 en su obra
Philosophiae Naturalis Principia Mathematica.
1ª Ley de Newton o ley de la inercia:
Un cuerpo permanecerá en un estado de reposo o
de movimiento uniforme, a menos de que una
fuerza externa actúe sobre él.
La primera ley de Newton, conocida también como
Ley de inercia, nos dice que si sobre un cuerpo no actúa
ningún otro, este permanecerá indefinidamente moviéndose
en línea recta con velocidad constante (incluido el estado
de reposo, que equivale a velocidad cero).
Como sabemos, el movimiento es relativo, es decir, depende
de cual sea el observador que describa el movimiento.
Así, ejemplo, para un pasajero de un tren, el interventor
viene caminando lentamente por el pasillo del tren, mientras
que para alguien que ve pasar el tren desde el andén de una
estación, el interventor se está moviendo a una gran velocidad.
Se necesita, por tanto, un sistema de referencia al cual referir el movimiento.
La primera ley de Newton sirve para definir un tipo
especial de sistemas de referencia conocidos como Sistemas de
referencia inerciales, que son aquellos sistemas de referencia desde
los que se observa que un cuerpo sobre el que no actúa ninguna
fuerza neta se mueve con velocidad constante.
En realidad, es imposible encontrar un sistema de referencia
inercial, puesto que siempre hay algún tipo de fuerzas actuando
sobre los cuerpos, pero siempre es posible encontrar un sistema
de referencia en el que el problema que estemos estudiando se
pueda tratar como si estuviésemos en un sistema inercial.
En muchos casos, por ejemplo, suponer a un observador fijo en
la Tierra es una buena aproximación de sistema inercial.
Siempre que una fuerza actúe sobre un cuerpo produce
una aceleración en la dirección de la fuerza que es directamente
proporcional a la fuerza pero inversamente proporcional a la masa.
La Primera ley de Newton nos dice que para que un cuerpo altere su
movimiento es necesario que exista algo que provoque dicho cambio.
Ese algo es lo que conocemos como fuerzas.
Estas son el resultado de la acción de unos cuerpos sobre otros.
La Segunda ley de Newton se encarga de cuantificar
el concepto de fuerza. Nos dice que la fuerza neta aplicada sobre
un cuerpo es proporcional a la aceleración que adquiere dicho cuerpo.
La constante de proporcionalidad es la masa del cuerpo,
de manera que podemos expresar la relación de la siguiente manera:
F = m a
Tanto la fuerza como la aceleración son magnitudes vectoriales,
es decir, tienen, además de un valor, una dirección y un sentido.
De esta manera, la Segunda ley de Newton debe expresarse como:
F = m a
La unidad de fuerza en el Sistema Internacional es el
Newton y se representa por N. Un Newton es la fuerza que
hay que ejercer sobre un cuerpo de un kilogramo de
masa para que adquiera una aceleración de 1 m/s2, o sea,
1 N = 1 Kg · 1 m/s2
La expresión de la Segunda ley de Newton que hemos dado
es válida para cuerpos cuya masa sea constante. Si la masa varia,
como por ejemplo un cohete que va quemando combustible, no es
válida la relación F = m · a. Vamos a generalizar la Segunda ley de
Newton para que incluya el caso de sistemas en los que pueda variar la masa.
Para ello primero vamos a definir una magnitud física nueva.
Esta magnitud física es la cantidad de movimiento que se
representa por la letra p y que se define como el producto
de la masa de un cuerpo por su velocidad, es decir:
p = m · v
La cantidad de movimiento también se conoce como momento lineal.
Es una magnitud vectorial y, en el Sistema Internacional se mide en Kg·m/s .
En términos de esta nueva magnitud física, la Segunda ley de Newton se
expresa de la siguiente manera:
La Fuerza que actúa sobre un cuerpo es igual a la variación temporal de la
cantidad de movimiento de dicho cuerpo, es decir,
F = dp/dt
De esta forma incluimos también el caso de cuerpos cuya masa no sea constante.
Para el caso de que la masa sea constante, recordando la definición de cantidad
de movimiento y que como se deriva un producto tenemos:
F = d(m·v)/dt = m·dv/dt + dm/dt ·v
Como la masa es constante
dm/dt = 0
Y recordando la definición de aceleración, nos queda
F = m a
Tal y como habíamos visto anteriormente.
Otra consecuencia de expresar la Segunda ley de Newton usando la
cantidad de movimiento es lo que se conoce como Principio de
conservación de la cantidad de movimiento. Si la fuerza total
que actua sobre un cuerpo es cero, la Segunda ley de Newton nos dice que:
0 = dp/dt
Es decir, que la derivada de la cantidad de movimiento con respecto al
tiempo es cero. Esto significa que la cantidad de movimiento debe ser
constante en el tiempo (la derivada de una constante es cero).
Esto es el Principio de conservación de la cantidad de movimiento:
si la fuerza total que actúa sobre un cuerpo es nula, la cantidad
de movimiento del cuerpo permanece constante en el tiempo.
Fuerza es toda causa capaz de modificar el estado de reposo
o de movimiento de un cuerpo, o de producir una deformación.
Aceleración
Se define la aceleración como la relación entre la variación
o cambio de velocidad de un móvil y el tiempo transcurrido en dicho cambio: a=v-vo/t
Donde "a" es la aceleración, "v" la velocidad final, "vo"
la velocidad inicial y "t" el tiempo.
La masa inercial es una medida de la inercia de un objeto,
que es la resistencia que ofrece a cambiar su estado de
movimiento cuando se le aplica una fuerza. Un objeto con
una masa inercial pequeña puede cambiar su movimiento
con facilidad, mientras que un objeto con una masa
inercial grande lo hace con dificultad.
La masa inercial viene determinada por la Segunda y
Tercera Ley de Newton. Dado un objeto con una masa
inercial conocida, se puede obtener la masa inercial de
cualquier otro haciendo que ejerzan una fuerza entre sí.
Conforme a la Tercera Ley de Newton, la fuerza experimentada
por cada uno será de igual magnitud y sentido opuesto. Esto permite
estudiar qué resistencia presenta cada objeto a fuerzas aplicadas de forma similar.
Dados dos cuerpos, A y B, con masas inerciales mA (conocida) y
mB (que se desea determinar), en la hipótesis que las masas son
constantes y que ambos cuerpos están aislados de otras influencias
físicas, de forma que la única fuerza presente sobre A es la que ejerce B,
denominada FAB, y la única fuerza presente sobre B es la que ejerce A,
denominada FBA, de acuerdo con la Segunda Ley de Newton:
FAB = mAaA
FBA = mBaB.
Donde aA y aB son las aceleraciones de A y B,
respectivamente. Es necesario que estas aceleraciones no sean nulas,
es decir, que las fuerzas entre los dos objetos no sean iguales a cero.
Una forma de lograrlo es, por ejemplo, hacer colisionar los dos cuerpos y efectuar las mediciones durante el choque.
La Tercera Ley de Newton afirma que las dos fuerzas son iguales y opuestas:
FAB = − FBA.
Sustituyendo en las ecuaciones anteriores, se obtiene la masa de B como
.![]()
Así, el medir aA y aB permite determinar mA en términos mB,
que era lo buscado. Obsérvese que el requisito que aB sea
distinto de cero hace que esta ecuación quede bien definida.
En el razonamiento anterior se ha supuesto que las masas de
A y B son constantes. Se trata de una suposición fundamental,
conocida como la conservación de la masa, y se basa en la hipótesis
de que la materia no puede ser creada ni destruida, sólo
transformada (dividida o recombinada). Es a veces útil, sin embargo,
considerar la variación de la masa del cuerpo en el tiempo: por ejemplo
la masa de un cohete decrece durante su lanzamiento.
Esta aproximación se hace ignorando la materia que entra y sale del sistema.
En el caso del cohete, esta materia se corresponde con el combustible
que es expulsado; si tuviéramos que medir la masa conjunta del
cohete y del combustible, comprobaríamos que es constante.
Ecuación, igualdad en la que intervienen una o más letras, llamadas incógnitas.
Es decir, es una igualdad entre expresiones algebraicas.
Las expresiones que están a ambos lados del signo igual son los miembros
de la ecuación: primer miembro el de la izquierda,
segundo miembro el de la derecha.
Se llama solución de una ecuación a un valor de la incógnita,
o a un conjunto de valores de las incógnitas, para los cuales se
verifica la igualdad. Una ecuación puede tener una, ninguna o varias soluciones.
El peso y la masa de los cuerpos son conceptos diferentes
aunque estrechamente relacionados.
es constante para cada cuerpo
Bien, masa es la medida de cuánta materia hay en un objeto;
el peso es una medida de qué tanta fuerza ejerce la gravedad
sobre ese objeto. Su propia masa es la misma no importa si
está en la tierra, en la luna, o flotando en el espacio-porque
la cantidad de materia de que usted está hecho no cambia. Pero
su peso depende de cuánta fuerza gravitatoria esté actuando
sobre usted en ese momento; usted pesaría menos en la luna que
en la tierra, y en el espacio interestelar, usted pesaría prácticamente nada.
Equilibrio aparente, es decir en el que los constituyentes evolucionan;
pero donde sus evoluciones se compensan.
Los equilibrios naturales son en general equilibrios dinámicos.
Para entender el concepto de equilibrio dinámico, citemos un ejemplo:
Supongamos que tomamos el porcentaje de personas entre 30 y 40
años que se encuentran casadas. Digamos, el 68%, por poner un número.
Si al otro año, tomamos la misma medición, descubriremos que el porcentaje
no ha variado significativamente. Sin embargo, las personas involucradas no
son las mismas. Es decir, se mantiene un equilibrio del conjunto, mientras
cambian los componentes, o su situación.
Cuando alguna causa externa intervenga, por ejemplo, la sanción de
una ley de divorcio, se redefinirán las condiciones,
estableciendo un nuevo estado de equilibrio.
A toda acción corresponde una reacción en igual
magnitud y dirección pero de sentido opuesto.
Tal como comentamos en al principio de la Segunda ley
de Newton las fuerzas son el resultado de la acción
de unos cuerpos sobre otros.
La tercera ley, también conocida como Principio de acción y reacción
nos dice que si un cuerpo A ejerce una acción sobre otro
cuerpo B, éste realiza sobre A otra acción igual y de sentido contrario.
Esto es algo que podemos comprobar a diario en numerosas
ocasiones. Por ejemplo, cuando queremos dar un salto hacia
arriba, empujamos el suelo para impulsarnos. La reacción
del suelo es la que nos hace saltar hacia arriba.
Cuando estamos en una piscina y empujamos a alguien,
nosotros también nos movemos en sentido contrario.
Esto se debe a la reacción que la otra persona hace
sobre nosotros, aunque no haga el intento de empujarnos a nosotros.
Hay que destacar que, aunque los pares de acción y
reacción tenga el mismo valor y sentidos contrarios,
no se anulan entre si, puesto que actúan sobre cuerpos distintos.
Fuerza Normal
Cuando un cuerpo está apoyado sobre una superficie
ejerce una fuerza sobre ella cuya dirección es perpendicular
a la de la superficie. De acuerdo con la Tercera ley de Newton,
la superficie debe ejercer sobre el cuerpo una fuerza de la misma
magnitud y dirección, pero de sentido contrario. Esta fuerza es la
que denominamos Normal y la representamos con N.
En la figura de la izquierda se muestra hacia donde está
dirigida la fuerza normal en los dos ejemplos que aparecían
en la figura anterior para el peso. Como ya hemos dicho,
siempre es perpendicular a la superficie de contacto y está
dirigida hacia arriba, es decir, hacia fuera de la superficie de contacto.
El rozamiento, generalmente, actúa como una fuerza
aplicada en sentido opuesto a la velocidad de un objeto.
En el caso de deslizamiento en seco, cuando no existe lubricación,
la fuerza de rozamiento es casi independiente de la velocidad.
La fuerza de rozamiento tampoco depende del área aparente de
contacto entre un objeto y la superficie sobre la cual se desliza.
El área real de contacto —esto es, la superficie en la que las
rugosidades microscópicas del objeto y de la superficie de
deslizamiento se tocan realmente— es relativamente pequeña.
Cuando un objeto se mueve por encima de la superficie de deslizamiento,
las minúsculas rugosidades del objeto y la superficie chocan entre sí,
y se necesita fuerza para hacer que se sigan moviendo.
El área real de contacto depende de la fuerza perpendicular entre
el objeto y la superficie de deslizamiento. Frecuentemente, esta
fuerza no es sino el peso del objeto que se desliza. Si se empuja el
objeto formando un ángulo con la horizontal, la componente vertical
de la fuerza dirigida hacia abajo se sumará al peso del objeto.
La fuerza de rozamiento es proporcional a la fuerza perpendicular total.
Cuando hay rozamiento, la segunda ley de Newton puede ampliarse a
Sin embargo, cuando un objeto se desplaza a través de un fluido,
el valor del rozamiento depende de la velocidad.
En la mayoría de los objetos de tamaño humano que se mueven en agua o
aire (a velocidades menores que la del sonido), la fricción es proporcional
al cuadrado de la velocidad. En ese caso, la segunda ley de Newton
se convierte en
La constante de proporcionalidad k es característica de los dos
materiales en cuestión y depende del área de contacto entre
ambas superficies, y de la forma más o menos aerodinámica
del objeto en movimiento.
La fuerza de rozamiento es una fuerza que aparece cuando
hay dos cuerpos en contacto y es una fuerza muy importante
cuando se estudia el movimiento de los cuerpos. Es la causante,
por ejemplo, de que podamos andar (cuesta mucho más andar
sobre una superficie con poco rozamiento, hielo, por ejemplo,
que por una superficie con rozamiento como, por ejemplo,
un suelo rugoso.
La experiencia nos muestra que:
La fuerza de rozamiento entre dos cuerpos no depende
del tamaño de la superficie de contacto entre los dos cuerpos,
pero sí depende de cual sea la naturaleza de esa superficie de
contacto, es decir, de que materiales la formen y si es más o menos rugosa.
La magnitud de la fuerza de rozamiento entre dos cuerpos en contacto
es proporcional a la normal entre los dos cuerpos, es decir:
Fr = m·N
Donde m es lo que conocemos como coeficiente de rozamiento.
Hay dos coeficientes de rozamiento: el estático, me, y el cinético,
mc, siendo el primero mayor que el segundo:
me > mc
Aplicaciones de las Leyes de Newton
Cuando aplicamos las leyes de Newton a un cuerpo, sólo
estamos interesados en aquellas fuerzas externas que actúan sobre el cuerpo.

Cuando una caja está en reposo sobre una mesa, las
fuerzas que actúan sobre el aparato son la fuerza normal, n,
y la fuerza de gravedad, w, como se ilustran. La reacción a n
es la fuerza ejercida por la caja sobre la mesa, n’.
La reacción a w es la fuerza ejercida por la caja sobre la Tierra, w’.
En otro ejemplo se tiene una caja que se jala hacia la derecha
sobre una superificie sin fricción, como se muestra en la figura de la izquierda.

En la figura de la derecha se tiene el diagrama de cuerpo libre
que representa a las fuerzas externas que actúan sobre la caja.
Cuando un objeto empuja hacia abajo sobre otro objeto con una fuerza F,
la fuerza normal n es mayor que la fuerza de la gravedad. Esto es, n = w + F.

En otro ejemplo se tiene un peso w suspendido del techo por
una cuerda de masa despreciable. Las fuerzas que actúan sobre
el peso son la gravedad, w, y la fuerza ejercida por la cadena, T.
Las fuerzas que actúan sobre la cuerda son la fuerza ejercida por el peso, T’, y la fuerza ejercida por el techo, T’’.










{kind=link}
{kind=link}